计算机视觉的主要任务和进展
计算机视觉任务、可视化和理解
Semantic Segmentation

训练集: 给每个像素点 打上语义类别标签
测试 : 给图片的每个像素点分类
思路一: Sliding Window ,上下文提取特征
Learning Hierarchical Features for Scene Labeling(TPAMI 2013)
Recurrent Convolutional Neural Networks for Scene Labeling(ICML 2014)
问题:效率很低,没有利用重叠的patchs的共享features.
思路二:全卷积
idea1: 提取上下文空间特征,不下采样从而保证输出和输入的shape一致$\Rightarrow$ 太贵了
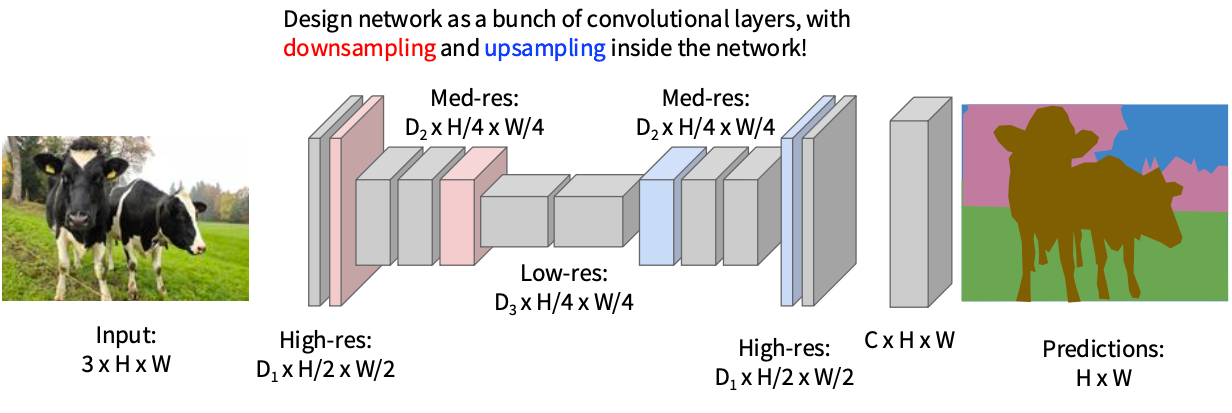
Idea2:先下采样然后再上采样来keep shape
Fully Convolutional Networks for Semantic Segmentation(CVPR 2015)
Learning Deconvolution Network for Semantic Segmentation(ICCV 2015)
下采样 : 先Pooling 再 Stride Convolution
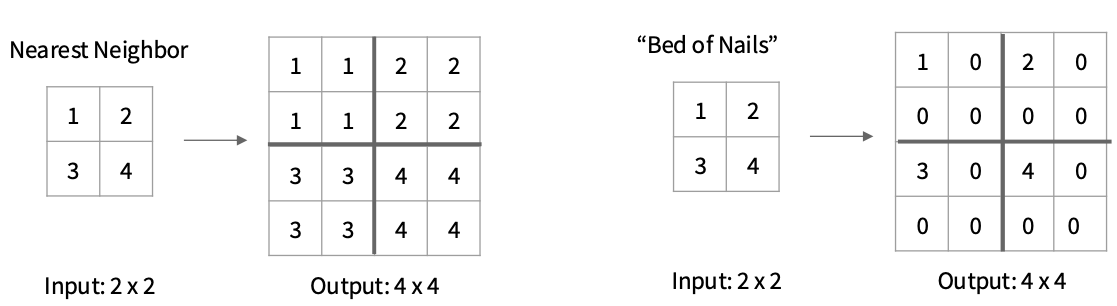
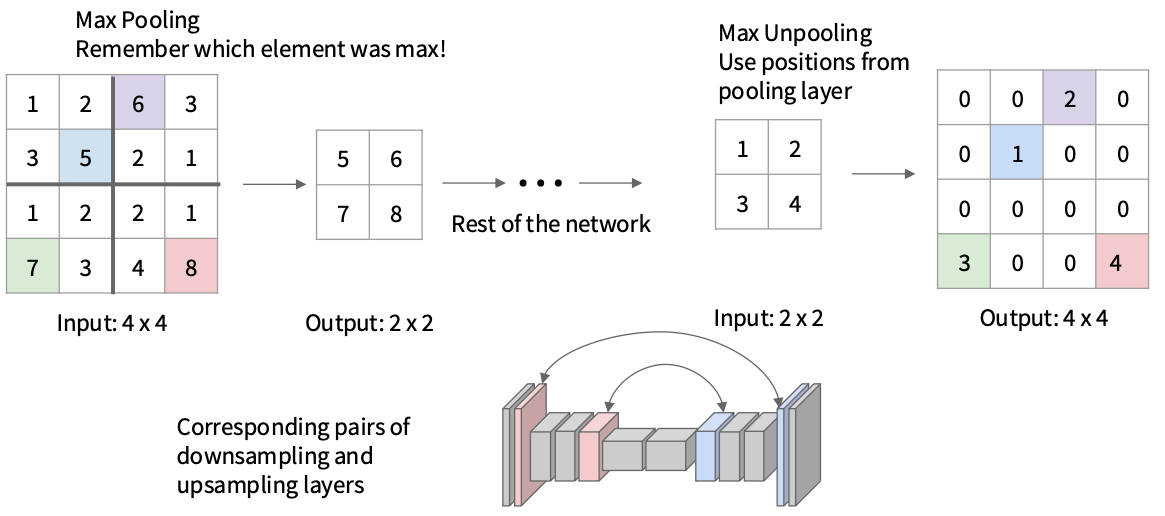
上采样 : Unpooling
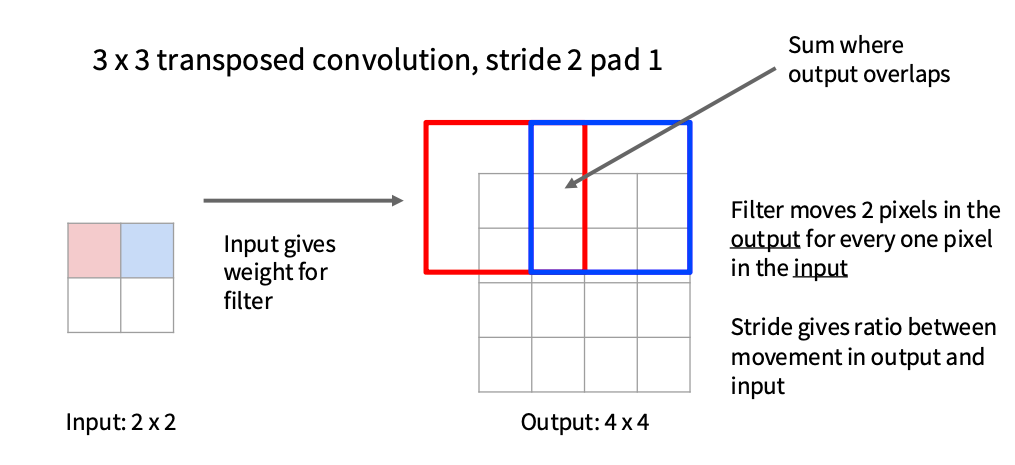
可学习的版本: 反卷积(Transpose Convolution)
思路三: U-Net
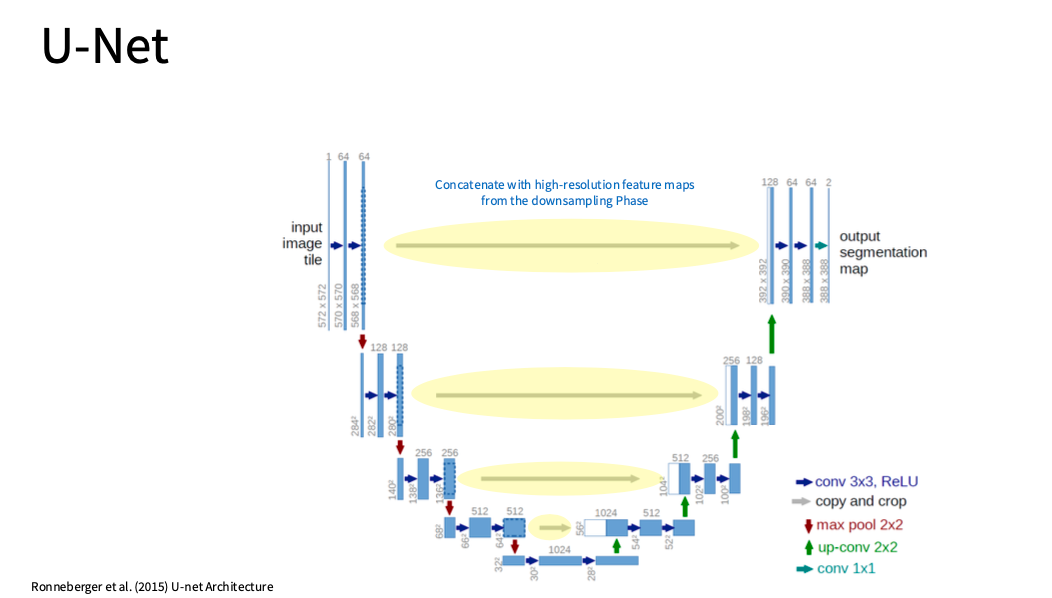
$\color{red} 别关心实例,只关注像素 $
- 先downsampling 再upsampling
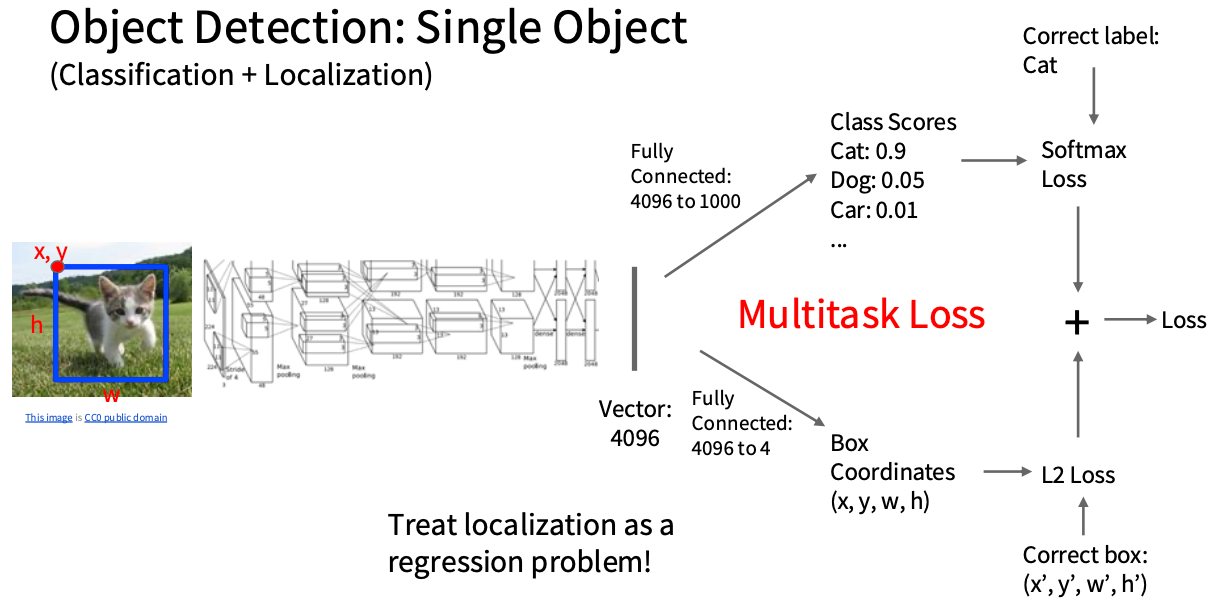
物体检测=Classification + Localization
但是对于多物体检测, Each image needs a different number of outputs!
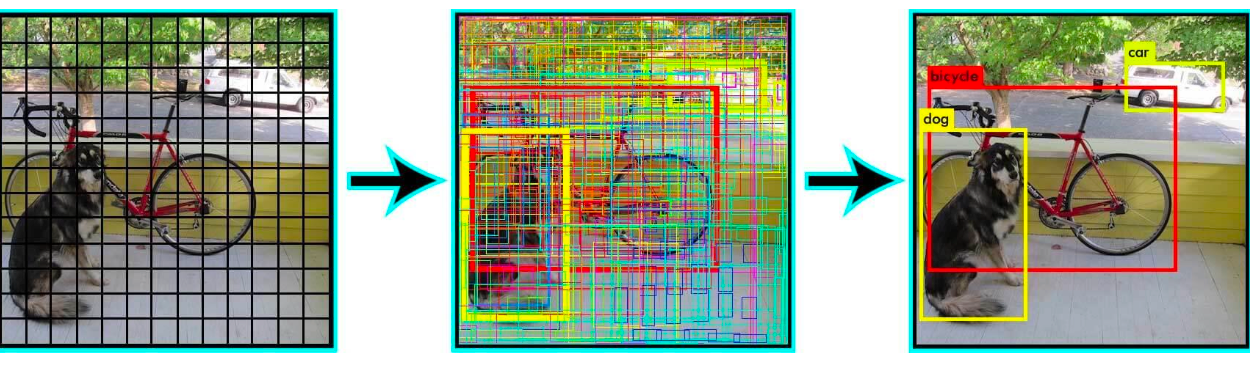
思路一: 将图片分成多个patch然后分别进行单物体检测
Problem: Need to apply CNN to huge number
of locations, scales, and aspect ratios, very
computationally expensive!
思路二: Region Proposals: Selective Search
● Find “blobby” image regions that are likely to contain objects
● Relatively fast to run; e.g. Selective Search gives 2000 region
proposals in a few seconds on CPU
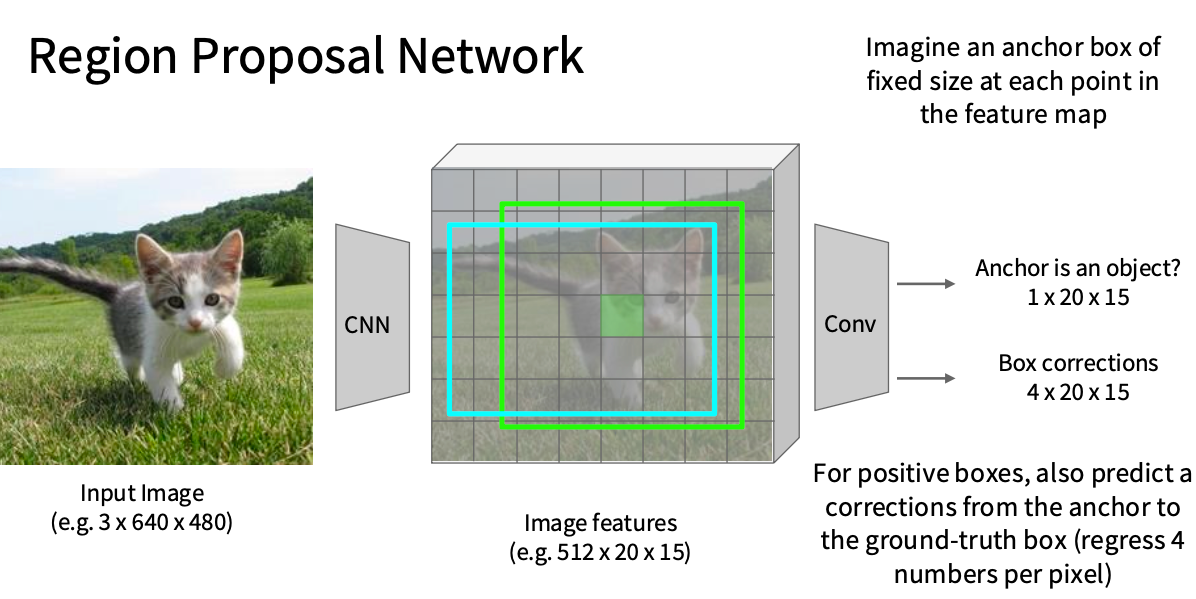
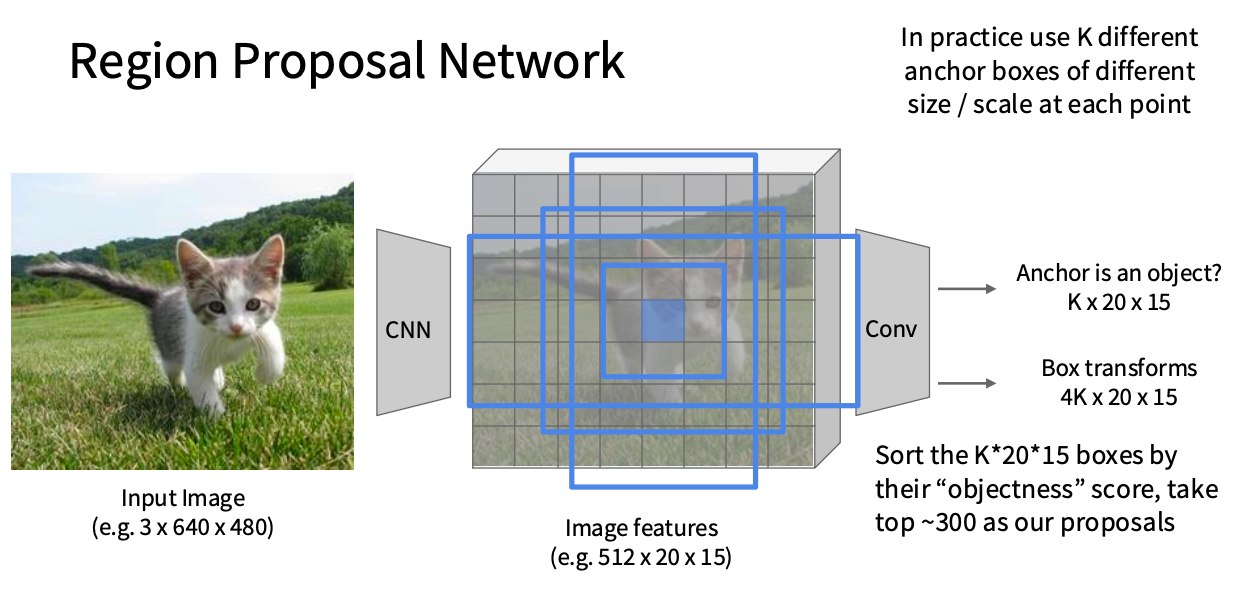
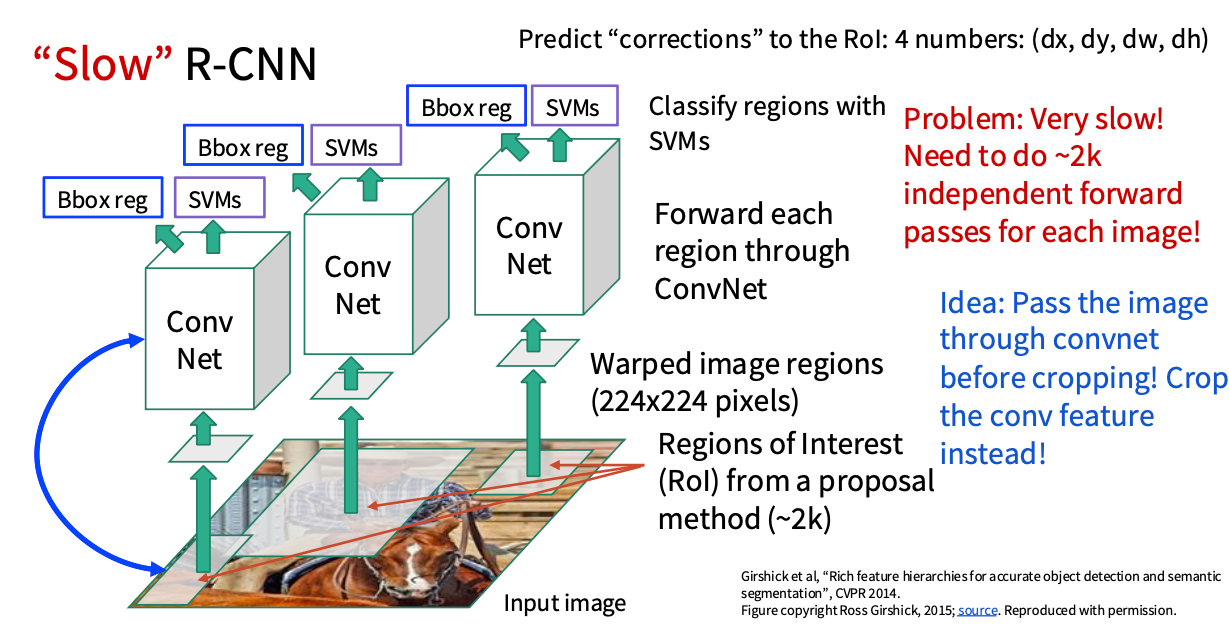
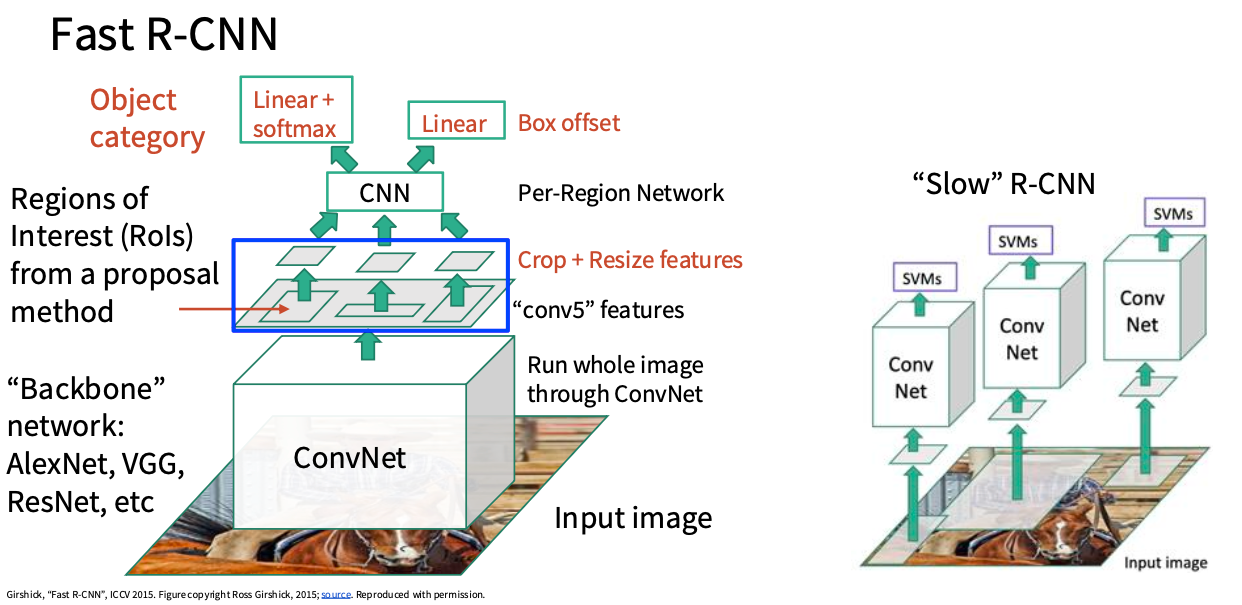
思路三: R-CNN
Rich feature hierarchies for accurate object detection and semantic segmentation(CVPR 2014)
Modern Method
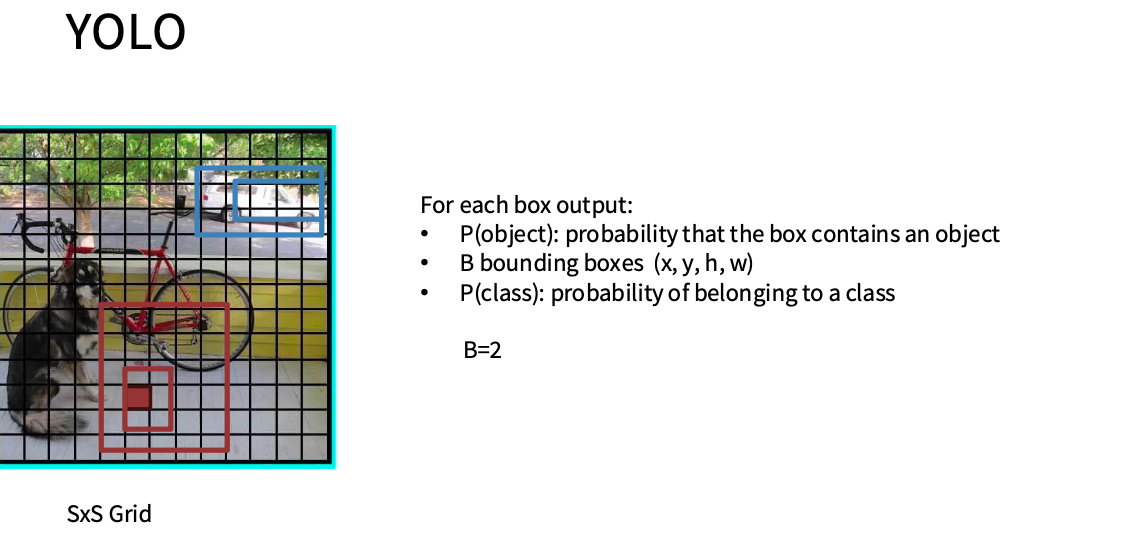
Single-Stage Object Detectors: YOLO / SSD / RetinaNet
Yolo(CVPR 2016)
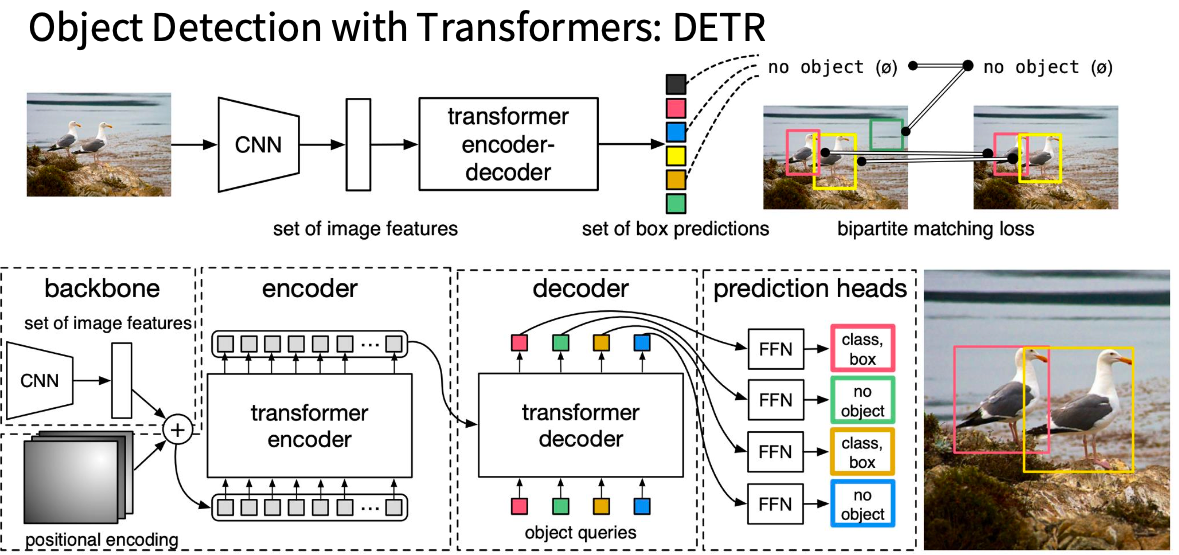
DETR:Object Detection with Transformers(ECCV 2020)
开源框架(Detectron)
可视化(可解释性)
Saliency Maps(ICLR workshop 2014)
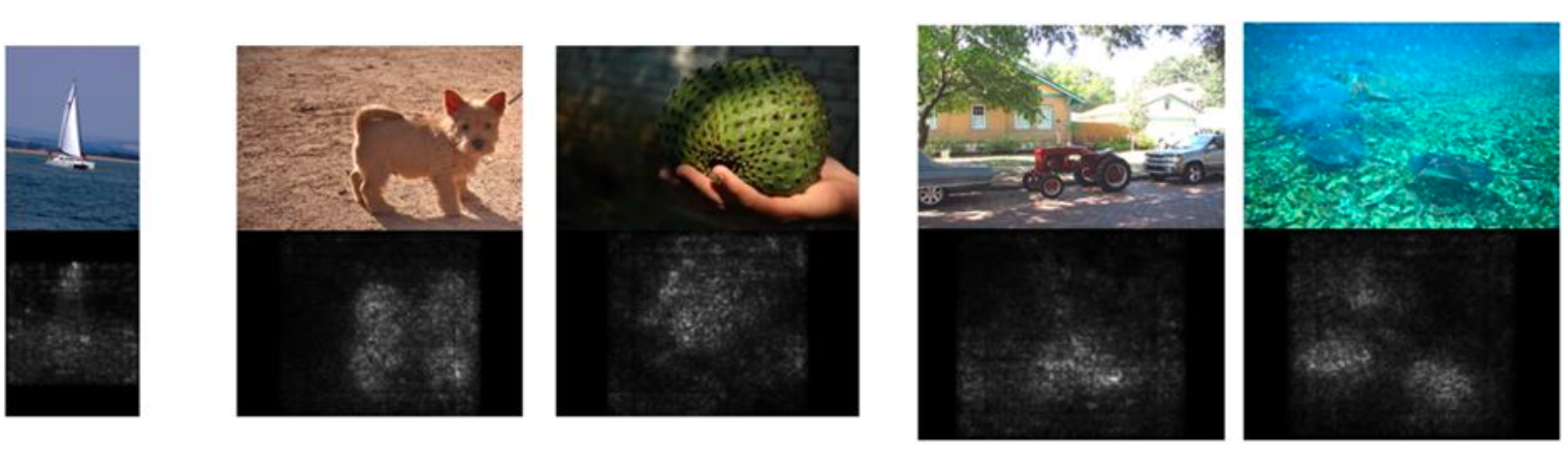
Saliency Maps(显著性图)本质上是:告诉你模型在做某个预测时,“输入的哪些位置/像素最影响这个预测”。通常用一张与输入同尺寸的热力图表示,越亮代表越“重要”。
对某个类别分数 ($S_c(x)$)(比如分类 logits)对输入 (x) 求梯度: \(M = \left|\frac{\partial S_c(x)}{\partial x}\right|\) 直觉:
- 如果某个像素稍微变化,会让类别分数变化很大 ⇒ 该像素对预测很关键 ⇒ map 上更亮。
- 常见做法:对 RGB 三通道取绝对值后再求和/取最大,得到单通道热力图。
优点:简单、一次反传就能算。 缺点:噪声大、容易“看起来很碎”。
Class Activation Map(CAM)(更像“模型在看哪里”)(CVPR 2016)
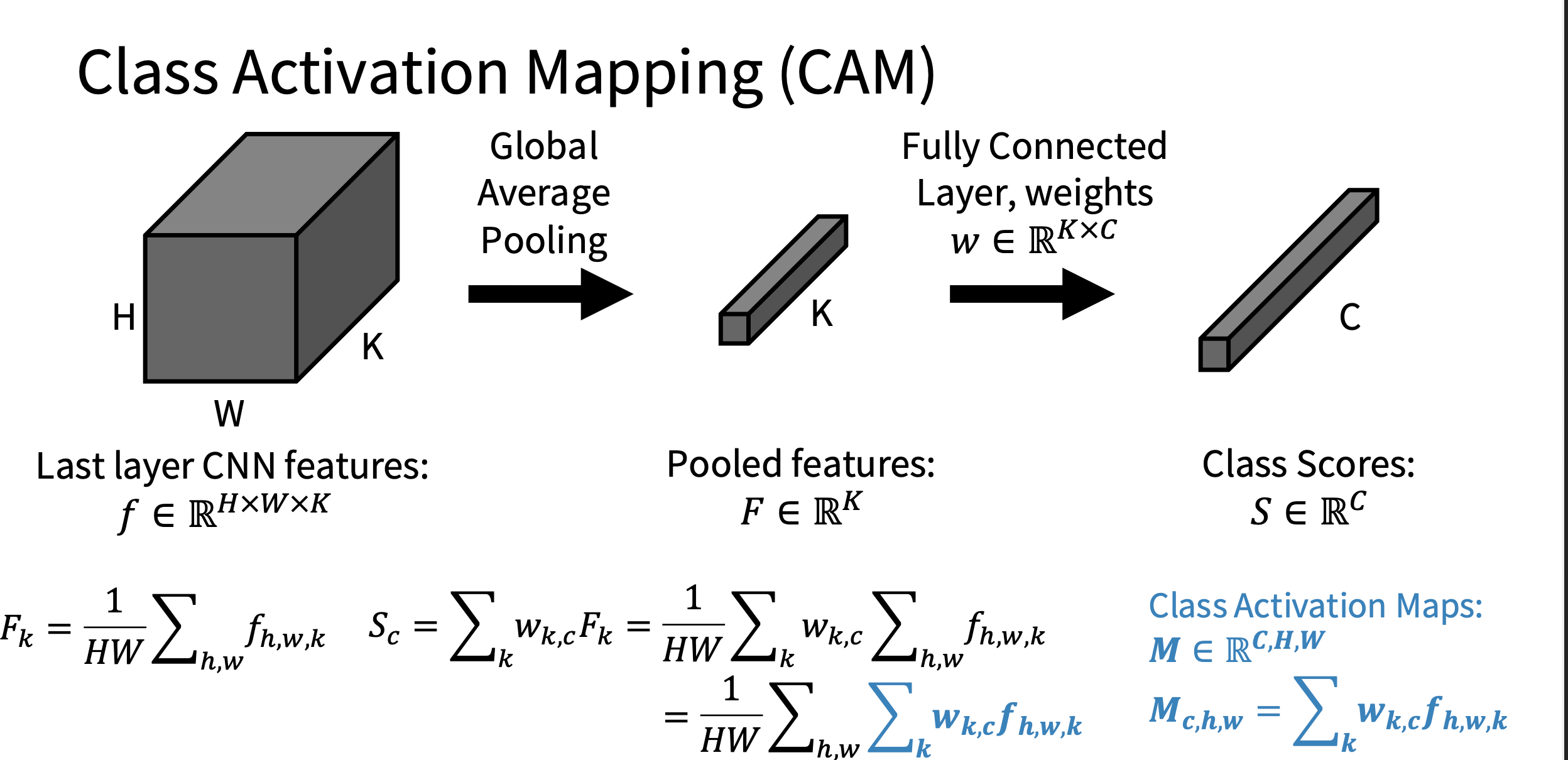
这类不是对输入求梯度,而是用最后一层卷积特征图做可视化。
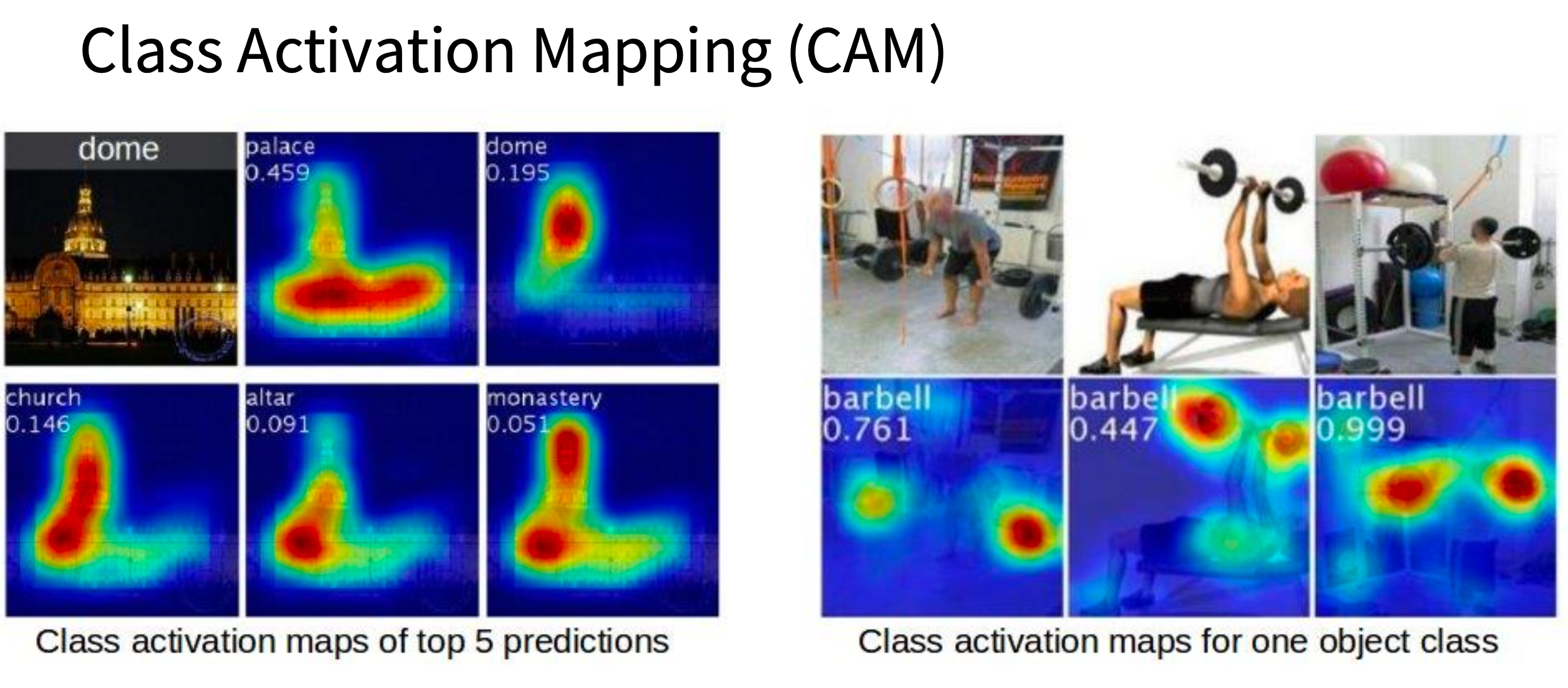
$\color{red}缺点:只能应用于最后一层$
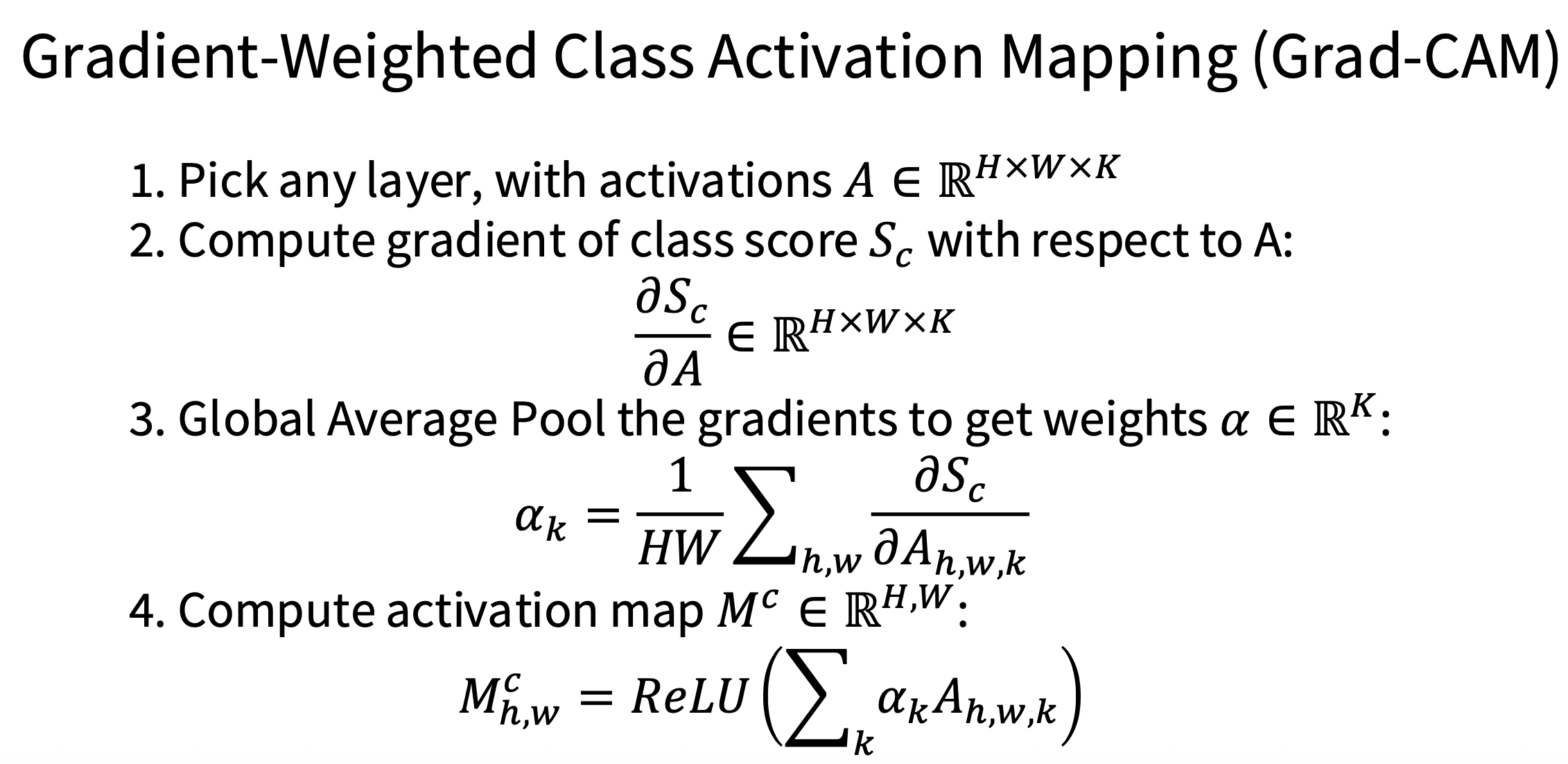
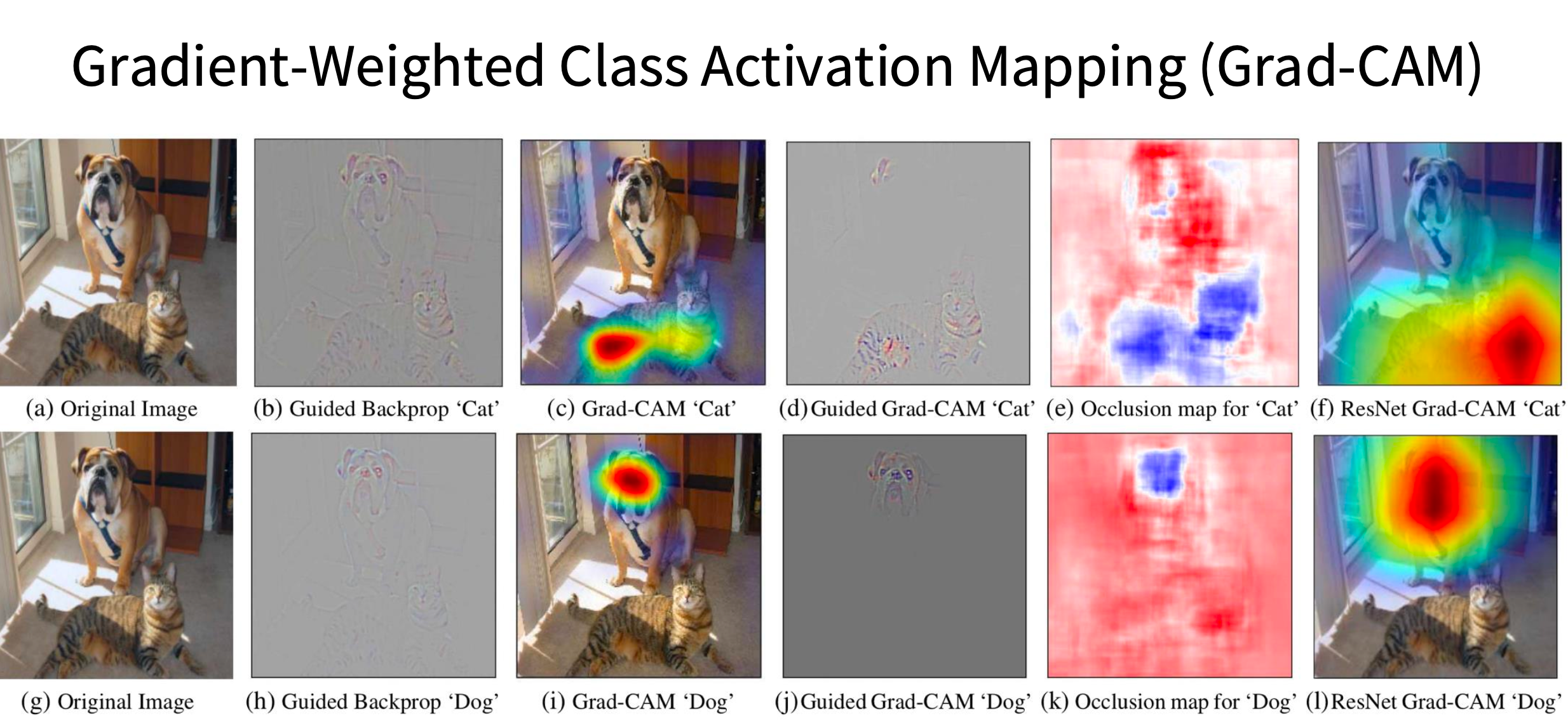
Gradient-Weighted Class Activation Mapping (Grad-CAM)(CVPR 2017)
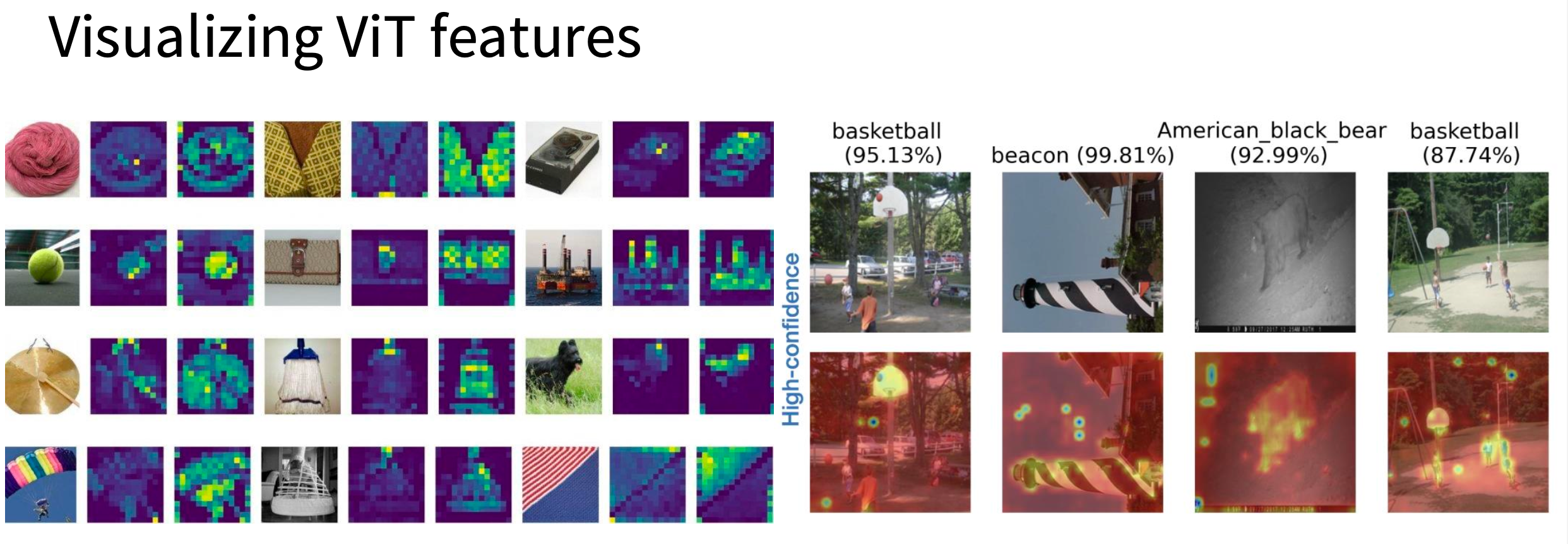
Visualizing ViT features